The history of industrial automation is characterized by periods of rapid change in popular methods. Either as a cause or, perhaps, an effect, such periods of change in automation techniques seem closely tied world economics. Use of the industrial robot, which became identifiable as a unique device in the 1960s, along with computer-aided design (CAD) systems and computer-aided manufacturing (CAM) systems, characterizes the latest trends in the automation of the manufacturing process. These technologies are leading industrial automation through another transition, the scope of which is still unknown.
Robots are computer controlled devices which perform tasks usually done by humans. The basic industrial robot in wide use today is an arm or manipulator which moves to perform industrial operations. Tasks are specialized and vary tremendously. They include :
- Handling. Loading and unloading components onto machines.
- Processing. Machining, drilling, painting, and coating.
- Assembling. Placing and locating a part in another compartment.
- Dismantling. Breaking down the object into its component parts.
- Welding. Assembling objects permanently by arc welding or spot welding.
- Transporting. Moving materials and parts.
- Painting. Spray painting parts.
- Hazardous tasks. Operating under high levels of heat, dust, radioactivity, noise, and noxious odors.
These figures below are the example of Industrial Robotics.
 Figure 1.1 Mobile Robotics (Robotino)
Figure 1.1 Mobile Robotics (Robotino)

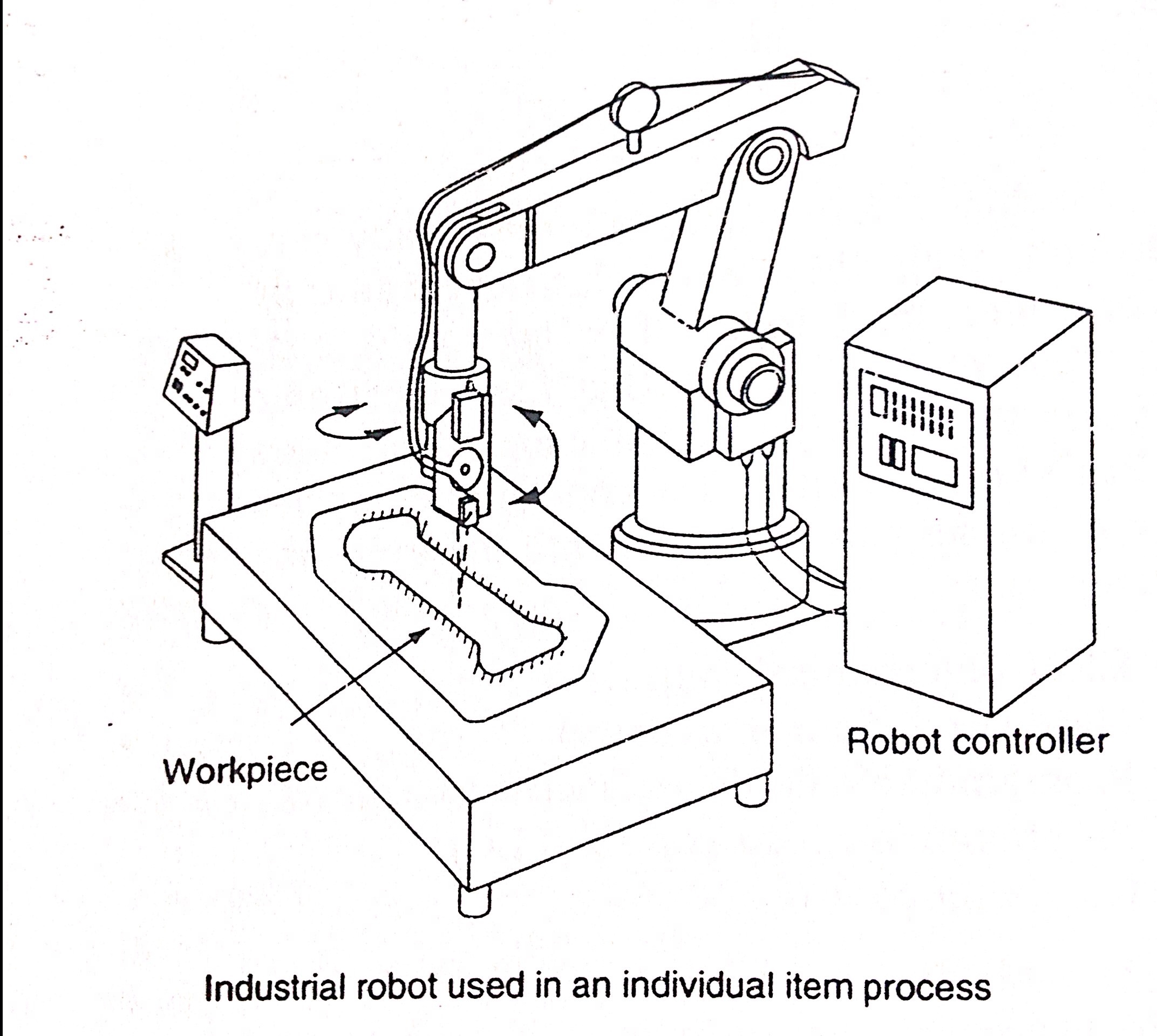
Figure 1.2 Arm Robot
Robotics Controllers
The controller contains the power supply, operator controls, control circuitry, and memory that direct the operation and motion of the robot and communication with external devices. Functionally, the controller has three major tasks to perform. Which are :
- Provide motion control signals for the manipulator unit (also known as signal processing).
- Provide storage for programmed events.
- Interpret input/output signals, including operator instructions.
In general, the controller includes the following devices that are used to operate the system:
- Operator panel
- Teach pendant
- CRT Screen and keyboard.
The robotic controller is a microprocessor based system that operates in conjunction with input and output cards or modules. With growing use of computers and PLCs in industry, the robot controller has become more important than the manipulator it controls. The robot controller is now required to communicate with devices outside itself such as PLCs and the plant computer systems.
References :
Petruzella (1996). Industrial Electronics.Singapore: McGraw Hill.
John J. Craig (2005). Introduction to Robotics: Mechanics and Control.United States of America: Pearson Prentice Hall.
http://www.robotshop.com/ca/en/festo-robotino-mobile-robotic.html (Figure 1.1)